计算题 一、lyapunov第一定理(10分) 例题:考虑非线性系统在处的稳定性。 解: 带入上面的式子,有,所以为唯一的平衡点。 然后套话先这么抄: 然后分别求偏导: 因此得出: 带入: 最后求这个矩阵的特征值: 特征值均小于0,所以系统稳定。 二、lyapunov第二定理(10分)
计算题
一、lyapunov第一定理(10分)
例题:考虑非线性系统在(0,0)处的稳定性。
{x˙1=−x1+x22,x˙2=−x2.
解:
x1=0,x2=0带入上面的式子,有x˙1=0,x˙2=0,所以(0,0)为唯一的平衡点。
f(x)=[f1(x1,x2)f2(x1,x2)]=[−x1+x22−x2]
A(x)=∂x∂f=[∂x1∂f1∂x1∂f2∂x2∂f1∂x2∂f2]
然后分别求偏导:
∂x1∂f1=∂x1∂(−x1+x22)=−1
∂x2∂f1=∂x2∂(−x1+x22)=2x2
∂x1∂f2=∂x1∂(−x2)=0
∂x2∂f2=∂x2∂(−x2)=−1
因此得出:
A(x1,x2)=[−102x2−1]
带入x1=0,x2=0:
A=[−100−1]
最后求这个矩阵的特征值:
λ1=λ2=−1<0
特征值均小于0,所以系统稳定。
二、lyapunov第二定理(10分)
例题:考虑非线性系统在(0,0)处的稳定性。
{x˙1=−x1+x2x˙2=−x1−x23
解:
令x˙1=0,x˙2=0:
{−x1+x2=0−x1−x23=0
由第一式得x2=x1,带入第二式得:
−x1−x13=−x1(1+x12)=0
⇒x1=0
∴x2=0
故(0,0)是唯一平衡点。
选Lyapunov函数:
V(x1,x2)=21(x12+x22).
显然V(0,0)=0,且对任意(x1,x2)=(0,0)有V(x1,x2)>0,即V正定
V˙=∂x1∂Vx˙1+∂x2∂Vx˙2=x1x˙1+x2x˙2
带入x˙1=−x1+x2,x˙2=−x1−x23:
V˙=x1(−x1+x2)+x2(−x1−x23)
=−x12+x1x2−x1x2−x24
=−x12−x24
对任意(x1,x2)=(0,0),有V˙=−x12−x24<0,因此V˙负定
故系统稳定。
第三种题型
例1
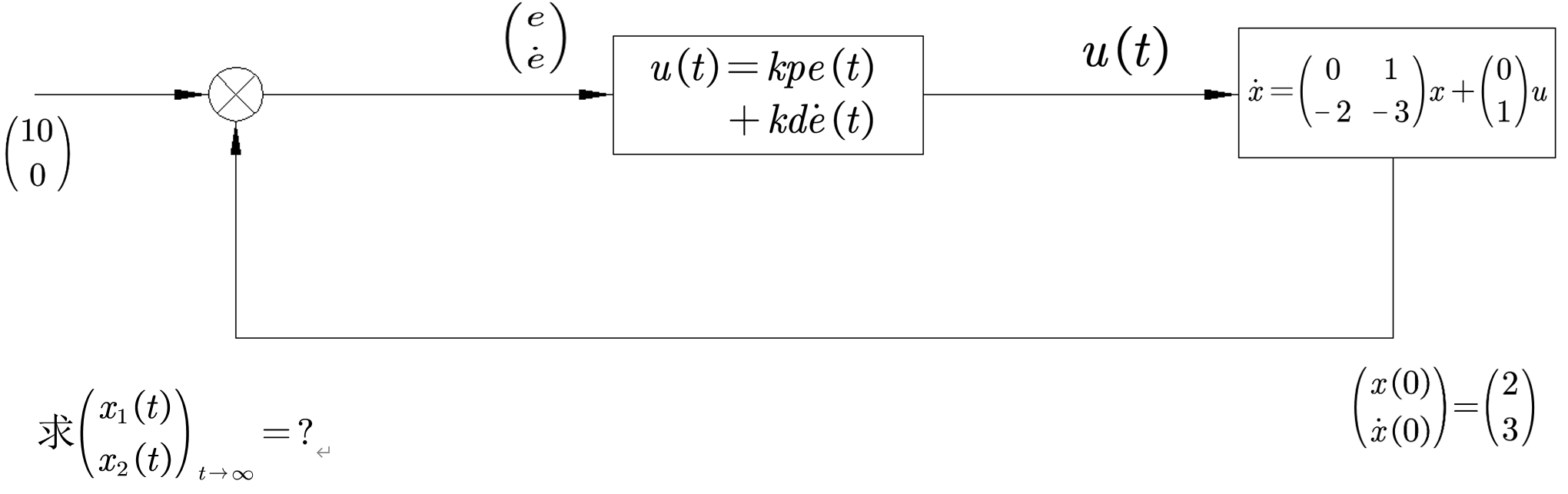
按正反馈理解
这张图没有标负号,那么严格按图理解,反馈量是正加到输入端的。
因此这张图应写成:
(ee˙)=(100)+(x1x2)
也就是:
e=10+x1
e˙=x2
控制律为:
u=kpe+kde˙
代入:
u=kp(10+x1)+kdx2
u=10kp+kpx1+kdx2
系统状态方程为:
x˙=(0−21−3)x+(01)u
即:
x˙1=x2
x˙2=−2x1−3x2+u
代入 u:
x˙2=−2x1−3x2+10kp+kpx1+kdx2
整理得:
x˙2=(kp−2)x1+(kd−3)x2+10kp
所以闭环系统为:
{x˙1=x2x˙2=(kp−2)x1+(kd−3)x2+10kp
求稳态,令:
x˙1=0,x˙2=0
由第一式:
x2=0
代入第二式:
0=(kp−2)x1+10kp
所以:
x1=kp−2−10kp
也可以写成:
x1=2−kp10kp
因此,如果闭环系统稳定,则:
t→∞lim(x1(t)x2(t))=2−kp10kp0 这里还要注意稳定条件。闭环矩阵为:
Ac=(0kp−21kd−3)
其特征方程为:
s2+(3−kd)s+(2−kp)=0
二阶系统稳定要求:
3−kd>0,2−kp>0
即:
kd<3,kp<2
所以最终更严谨地说:
kd<3, kp<2 时,t→∞lim(x1(t)x2(t))=2−kp10kp0 初值
(x(0)x˙(0))=(23)
只影响暂态过程;如果闭环稳定,它不影响最终稳态值。
如果老师默认“比较点输出就是 e=r−x”即使图里没写负号,那就按负反馈算。但从你这张图的标注来看,没有负号就应按正反馈处理。
按图中的负反馈理解:
e(t)=10−x1(t),e˙(t)=0−x2(t)=−x2(t)
控制律为
u(t)=kpe(t)+kde˙(t)
所以
u(t)=kp(10−x1)−kdx2
代入系统方程
x˙=(01 −2−3)x+(0 1)u
得到闭环系统:
x˙1=x2
x˙2=−(2+kp)x1−(3+kd)x2+10kp
稳态时:
x˙1=0,x˙2=0
因此
x2(∞)=0
0=−(2+kp)x1(∞)+10kp
所以
x1(∞)=kp+210kp
最终结果为
t→∞lim(x1(t) x2(t))(kp+210kp 0)
成立条件是闭环系统稳定,即
kp>−2,kd>−3
其中初始条件
x(0)=(2 3)
只影响瞬态过程,不影响稳定情况下的最终稳态值。注意这个系统只有 PD 控制,没有积分环节,所以稳态位置一般不会等于 10,而是存在稳态误差:
e(∞)=10−kp+210kp=kp+220
例2
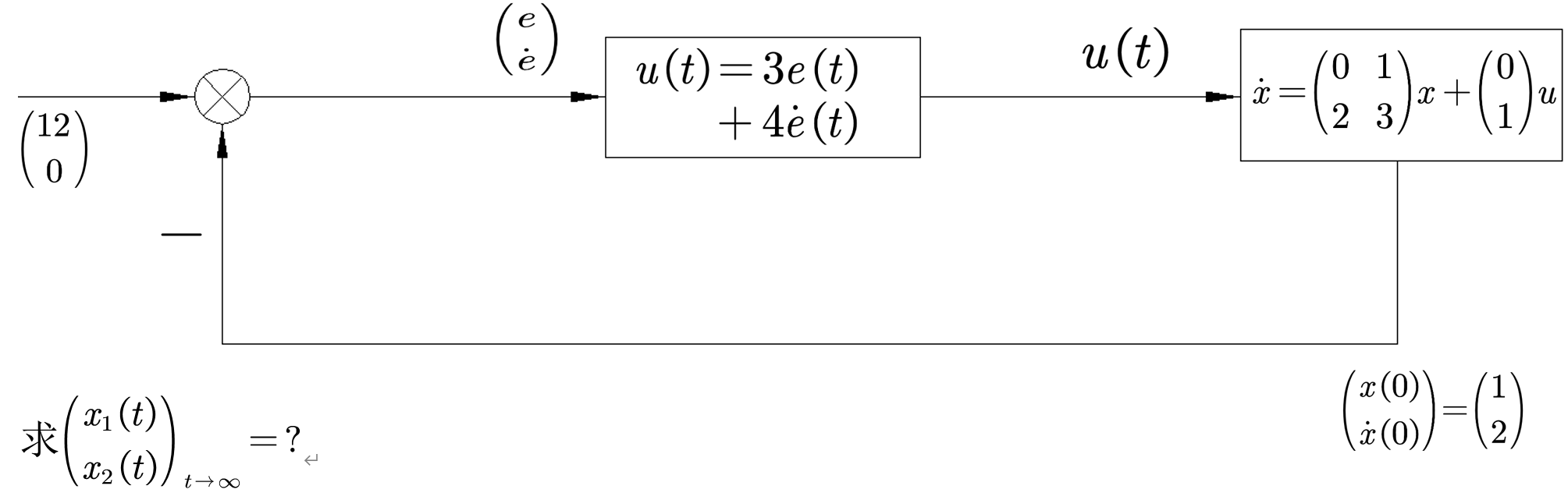
由图可得:
r=(120),e=r−x
其中
x=(x1x2)=(xx˙)
所以
e=12−x1,e˙=0−x2=−x2
控制律为
u(t)=3e(t)+4e˙(t)
代入得:
u=3(12−x1)+4(−x2)
u=36−3x1−4x2
系统状态方程为:
x˙=(0213)x+(01)u
即:
x˙1=x2
x˙2=2x1+3x2+u
代入 u:
x˙2=2x1+3x2+36−3x1−4x2
x˙2=−x1−x2+36
所以闭环系统为:
{x˙1=x2x˙2=−x1−x2+36
求稳态时令:
x˙1=0,x˙2=0
由
x˙1=x2=0
再代入第二式:
0=−x1−0+36
x1=36
因此:
t→∞lim(x1(t)x2(t))=(360)
注意:结果不是 (120),因为这个系统没有积分环节,且被控对象本身有 2x1+3x2 项,比例微分反馈只能改变闭环动态,不能保证稳态值严格等于参考输入。